中国科学家重建“嫦娥四号”落月轨迹,精确定位着陆位置
中国科学家重建“嫦娥四号”落月轨迹,精确定位着陆位置
北京时间9月24日23时,国际顶级学术期刊《自然》(Nature)子刊《自然-通讯》(Nature Communications )在线发表了一篇来自中国科学家的成果:Descent trajectory reconstruction and landing site positioning of Chang’E-4 on the lunar farside。中国科学院国家天文台副台长、月球与深空探测研究部主任李春来领导的“嫦娥四号”研究团队,精确定位了“嫦娥四号”的着陆位置,并对“嫦娥四号”的落月过程进行了重建。
这一研究工作“为‘嫦娥四号’着陆器和‘玉兔二号’月球车开展科学探测提供了背景信息和位置基准”。论文第一作者、中国科学院国家天文台研究员刘建军对澎湃新闻记者()表示,“嫦娥四号”着陆器作为月面永久性标志,其位置的精确定位,可以作为月球背面的控制点,将是月球背面控制点研究、高精度月球测绘的基础。“也将为我国未来深空探测任务(例如小行星附着、火星软着陆)提供技术支持”。

2019年1月3日,中国的“嫦娥四号”月球探测器在冯 卡门陨石坑(Von Kármán crater)着陆,成为人类历史上首个着陆于月球背面的无人探测器。
9月23日晚间,“嫦娥四号”着陆器和“玉兔二号”月球车安全度过长达14天的月夜极低温环境后,分别受光照成功自主“唤醒”,进入第十个月昼工作期。截至第九月昼期,“玉兔二号”月球车共行走284.661米。科研人员则根据获得的工程和科学数据持续开展着相关研究工作。
行星探测中关注的焦点之一:重建动力下降轨迹
论文中提到,自2018年12月8日发射以来,“嫦娥四号”先后完成了从地球接近月球、绕月球轨道运行和动力降落等多个阶段。其中,动力下降阶段是软着陆、实现安全落月的重要阶段,是在完全自主控制下实现的。
根据轨道设计,“嫦娥四号”动力下降段减速采用7500N变推力发动机,该阶段包括主制动、姿态调整、垂直下降、悬停、避障、慢下降等阶段。
此前的1月3日10时15分,“嫦娥四号”探测器从距离月面15公里处开始实施动力下降,7500N变推力发动机开机,逐步将探测器的速度从相对月球1.7公里每秒降到零。在6-8公里处,探测器进行快速姿态调整,不断接近月球;在距月面100米处开始悬停,对障碍物和坡度进行识别,并自主避障;选定相对平坦的区域后,开始缓速垂直下降。约690秒后,“嫦娥四号”探测器自主着陆在月球背面最大、最深、最古老的南极-艾特肯盆地(South Pole-Aitken)内的冯·卡门撞击坑内。
刘建军表示,“月面软着陆动力下降段是一个复杂的过程,历时短,速度变化快,难以通过地面实时控制,通常只能利用探测器自身携带的敏感器进行自主测量和控制。”
研究团队提到,为了掌握探测器自主控制的效果,建立任务规划和科学探测的位置基准,重建探测器动力下降段轨迹和精确确定着陆点位置具有重要的工程和科学意义,一直是行星探测中关注的焦点之一。
一般而言,行星表面软着陆轨迹重构和着陆点位置定位,通常采用无线电测量、遥测数据分析等方法。
然而,这些方法对此次的研究并不适用。刘建军解释,对于“嫦娥四号”着陆器,由于是在月球背面进行软着陆,受月球遮挡的影响,地面设备无法进行跟踪实现对月球背面软着陆探测器的直接无线电测量;同时,由于“鹊桥”中继星和着陆器上未配置无线电测量设备,也无法进行间接测量。另一方面,利用中继星回传的探测器高度、加速度和姿态等的遥测数据又非常有限。
因此,精确重构“嫦娥四号”探测器下降轨迹和着陆点精确定位变得非常困难。
精细重构自主导航降落过程
论文中提到,上述这些问题可以通过基于着陆相机影像的定位技术得到有效解决,这将不受月球重力场、动力学模型等因素的影响。刘建军称,“这是解决月球背面软着陆轨迹重构和着陆点精确定位的一种有效途径。”
研究团队利用“鹊桥”安全着陆后传输的高频着陆序列图像,对“嫦娥四号”进行下降轨迹重建和着陆点定位,完整记录了动力下降的全过程。
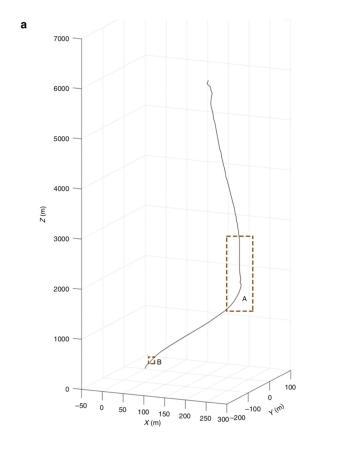
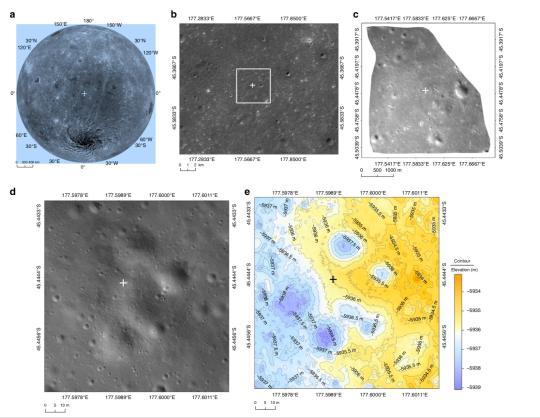
“嫦娥四号”从6000米高度到月面的下降轨迹。研究团队采用“嫦娥二号”(CE2TMAP2015)的数字正射影像图(DOM)和数字高程模型(DEM)作为地理参考数据。采用“嫦娥四号”着陆相机(LCAM)序列图像,重建“嫦娥四号”动力下降轨迹。

中国观察